
PX series parvae currentis motoris apparatus
Overview
J-SZ(ZYT)-PX series parvae DC motorum apparatus apparatus sunt respective compositae ex SZ(ZYT) seriei DC motorum et PX speciei planetarii reductores ordinarii praecisiones, et cum copia virtutis instructae, quae celeritatem dispositionem inexplicabilem cognosci possunt.Lata commensuratio range, parvitas, levis ponderis, alta efficientia, compages compacta, magna output torques, late in activis quae exigunt velocitatem low, torques altam, et gradus gradus informis expers.Infinita velocitas variabilis.
PX reducens series calces planetarum directe coniungi potest cum AC motoribus, stepper motoribus et aliis motoribus.
PX series etiam directe coniungi potest cum calces redigentis et cycloides ac pinwheel cycloideus reducens ad reducendos formare reducentes cum diversis rationibus velocitatis vel magnae celeritatis rationum.
Reductor Model Instructionis
Motor Model
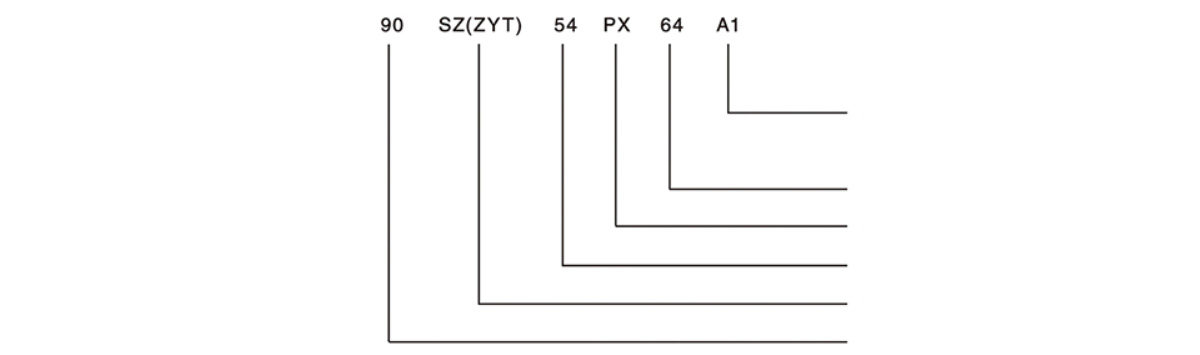
Forma institutionis A1-: A1 est pes institutionis, A3 est installation flange, B5 est rotundum flange institutionem
64 - Reductione ratio: 1, 64 .
PX - Ordinaria Precisione Planetaria Reducer
54 - Motor perficientur parametri
SZ(ZYT) - DC Servo Motor (Permanent Magnet DC Motor)
XC - motor basin numerus: Indicat diametros 90mm
Reductor Model
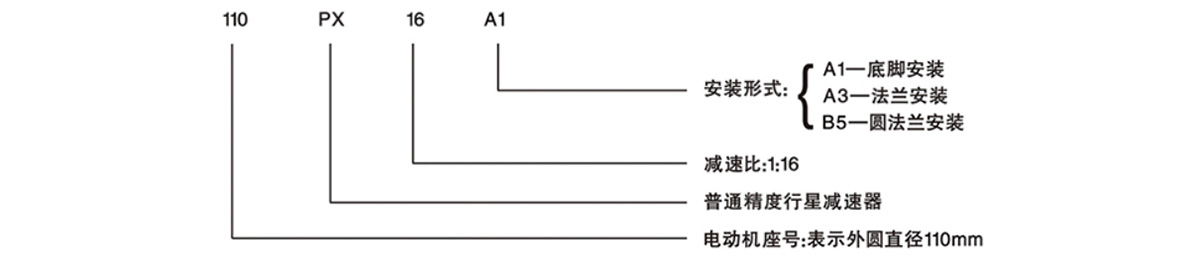
Forma institutionis A1-: A1 est pes institutionis, A3 est installation flange, B5 est rotundum flange institutionem
16 - Ratio reductionis: 1, 64 .
PX - Ordinaria Precisione Planetaria Reducer
110 - motor basin numerus: Indicat diametros 90mm . exteriores
De technica notitia motoris electrica
| Celeritas (r/min) | Torque(mN.m) | Model | Potestas | Rated Mobilitate (r/min) | install | Rated Voltage | Redigendum Ratio | Dicta | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660 | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270 | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780 | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
PS seriei generalis celeritatis ratio
Level 1: 4, 6
Secundarium: 16, 24, 36 .
Level 3: 64, 96, 144, 216
Level 4: 256, 384, 576, 864, 1296
90PX series non-vexillum celeritatis ratio
Level I: 3
Level 2: 9, 12 , 18
Level 3: 27, 48, 54, 72, 108
Level 4: 81, 162, 192, 288, 324, 432, 648
110PX series non-vexillum celeritatis ratio
Level 1: 5
Level 2: 20, 25 , 30
Level 3: 80 , 100 , 120 , 125 , 150 , 180
Level 4 : 320 , 400 , 480 , 500 , 600 , 625 , 720 , 750 , 900 , 1080
Reducatores non-vexillares ut peculiaris celeritatis ratio, celeritas, magnitudo institutionis, designari possunt etc
Exemplum Electio
Usor recte eligere potest potentiam et exemplar reducendi secundum systema operandi et naturam oneris referendo ad sequentia contenta.
1.Secundum pondus torque et velocitatem reducendi output, potestas inquisita computari potest hac formula: P=T n/kh
In formula: P- output potentia WT - onus torque Nm, elige n- output celeritatis r/min secundum technicae notitiae schedam
K- load constans 9560 η - efficientia transmissionis, ex tabula sequenti selecta
Ratio tradendae
| Ratio tradendi (i) | 4(6) | 16(36). | 64(216) | 256 (1296) |
| η | 0.76 | 0.72 | 0.68 | 0.65 |
2.Praefectus motoris eligi potest ut perspiciat gradum sine celeritate mutationem reducentis ab O ad celeritatem aestimatam.
3. Secundum systema operandi et naturae onus, ministerium coefficientis seligi potest respectu ministerii mensae coefficientis.Post calculum, potestas reducendi requisita determinari potest, et secundum requisitam output celeritatem, reductor exemplar eligi potest referendo ad tabulam datam technicam.
Opus Index Sheet
| Cotidiana Opus Tempus | Load Level | |||
| Mediocris stabilis | Medium vibrant | Gravis impulsum | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1.50 | 2 | |
Exempli gratia: si onus par est et stabilis, vis motoria quaesita aestimata est 40W, voltatio aestimata 110V est, ratio velocitatis output est 4, et tempus laborantis per diem est 12h, tunc 40W seligitur.Si natura oneris est, tremor est modica;
Deinde: a.Referre ad mensam servitii coefficientis ad seriem ministerii eligendam sicut 1.25.Requisita potentia W=40W*1.25=50W
b.Reprehendo technica notitia sheet ad libitum J70SZ54P * 4
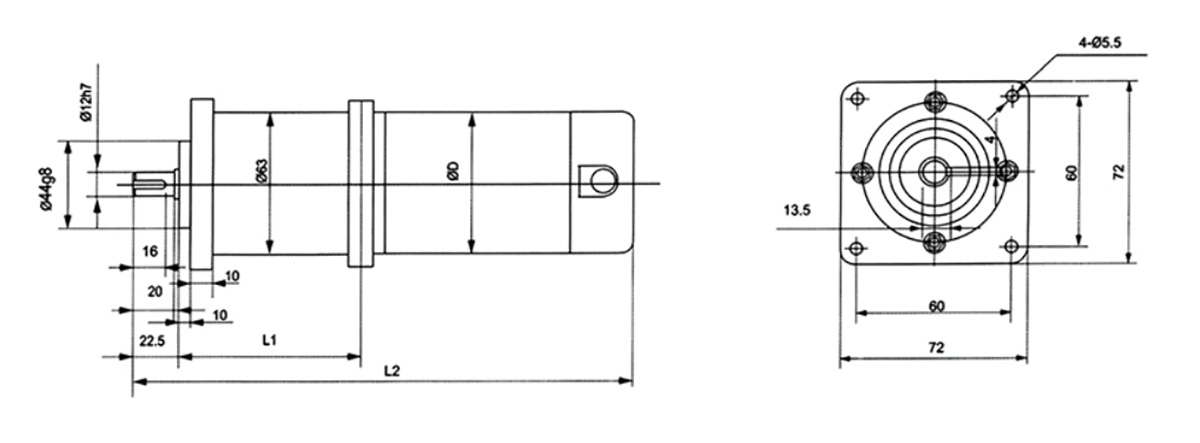
70PX ante LABIUM
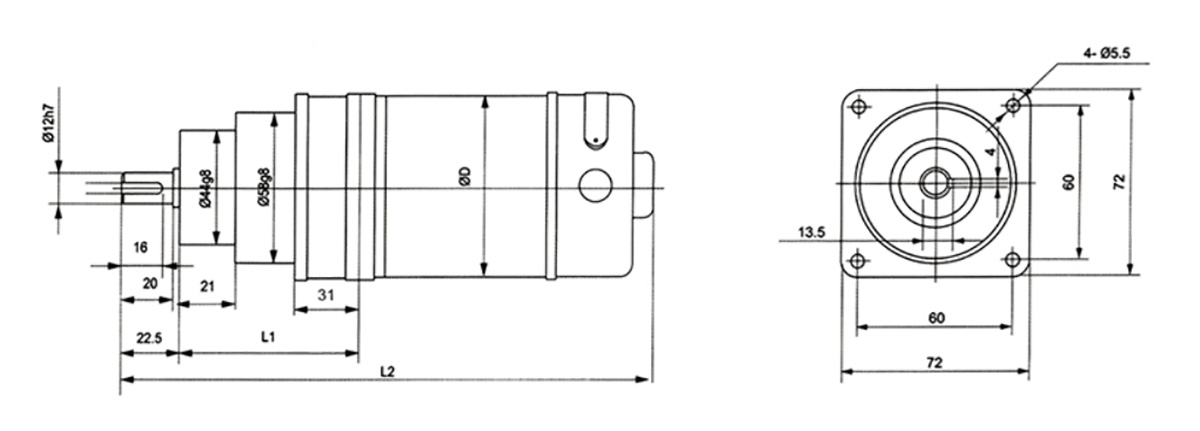
70PX tergo LABIUM
Products categories
-

Dc reductione motoris 15W30W60W90W120W200W300W slo...
-

12V24V magnetis permanentis DC retardationis motoris 1.
-

250W-600W 12-48V motor penicilli principalis analecta fo...
-

96V7.5KW Brushless dc magnete permanente motore ne...
-

Planetarius DC retardationem motoriam 42XA775 magnae t...
-

Xinda rv40 DC reductione motoris 12/24v2...





